近日,人机物融合智能计算团队在具身智能导航领域取得重要进展,研究成果“Bio-inspired Cognitive Navigation for Robots(生物启发的具身认知导航)”被Nature子刊《Nature Reviews Electrical Engineering》录用。该成果作者全部来自人机物融合群智计算教育部重点实验室,第一作者为郝肇铁同学,郭斌教授与於志文教授为共同通讯作者。
该研究聚焦认知神经科学与具身智能导航的交叉前沿,首次深入剖析生物导航的神经认知机理,构建了一套认知神经科学启发的具身导航框架,为具身智能体在复杂环境中的高泛化、低功耗、快速响应导航提供了新的理论路径。该成果不仅系统性地回应了当前具身导航在泛化能力、能量受限、响应延迟等方面的共性瓶颈,也为具身智能在行星探索、海洋环境、地下空间等极端复杂场景下的应用拓展了新的可能。同时,研究还为神经科学、人工智能、具身智能等领域的交叉和深度融合开辟了新的技术路线。
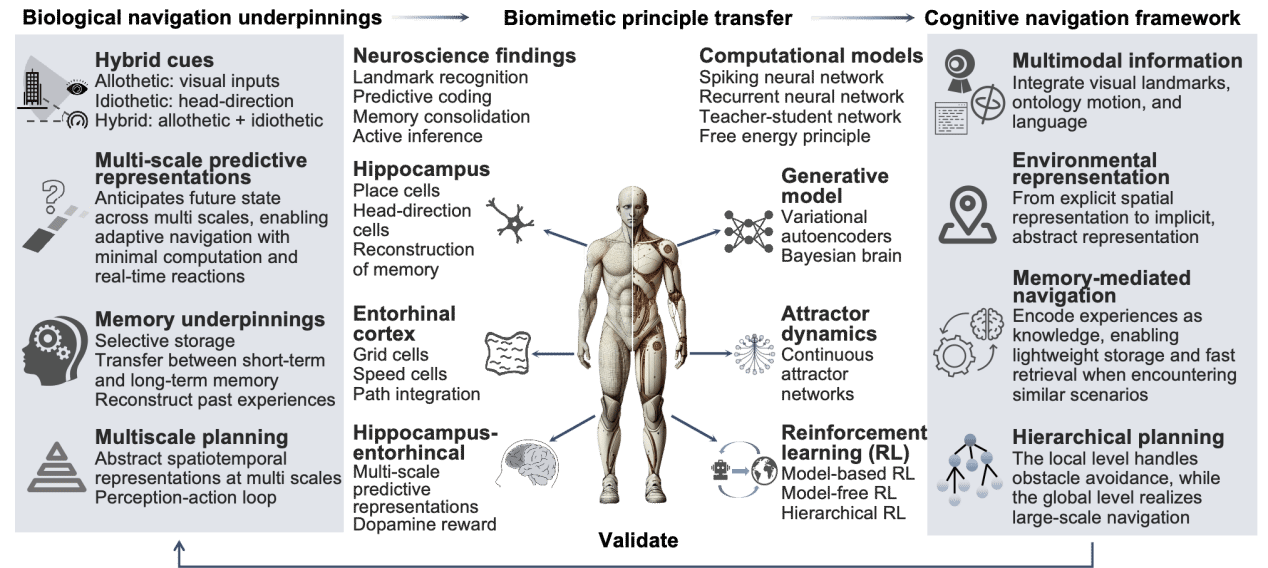
生物认知导航机制到具身智能体系统的映射
自Edward C. Tolman于1948年首次在小鼠实验中提出“认知地图”概念以来,神经科学领域历经数十年探索,逐步揭示了大脑空间导航的底层机制。研究人员在多种生物的海马体—内嗅皮层系统中不断发现与认知地图相关的神经表征,这一方向的突破性进展促成了2014年诺贝尔生理学奖授予支撑空间定位与导航能力的神经细胞的研究。这些成果为理解认知功能如何在大脑中被表征、复杂行为如何被计算与组织奠定了重要基础。尽管神经科学领域的空间导航研究取得了显著进展,但长期以来,神经科学与具身导航研究处于相对割裂的状态。自然界中的生物依赖内在的认知地图,能够在陌生环境中以极低能耗实现长时间稳定导航;相比之下,现有具身智能体在泛化能力、能效和持续任务执行方面仍存在明显差距,难以持续适应未知环境。针对这一瓶颈,该研究从跨物种神经科学中汲取灵感,系统提炼出多模态感知融合、预测性表征、记忆驱动决策与分层规划等关键认知机制,并以“认知地图”为核心,构建了一套统一的空间理解与决策框架,旨在弥合神经科学理论与具身导航实践之间的鸿沟。该框架强调基于多尺度预测的空间表征,不同于依赖精确坐标的传统方法,更注重以地标和语义关系构建空间表示。通过感知、记忆、推理与行动四者的协同,系统能够实现对未知环境的快速适应与高效导航。进一步地,研究提出将这些能力进行有机整合,并根据环境与任务需求动态调配,从而构建出兼具泛化能力与能效优势的机器人导航架构。
在文章审稿阶段,审稿人也对该工作给予积极评价“The paper provides an excellent conceptual framework for cognitive navigation in embodied agents carefully integrating existing advancements in cognitive maps, predictive maps, memory reply and abstraction, neuromorphic computing, active inference, and hierarchical planning. These are many advancements and bringing them together to show how they may enable cognitive navigation is not an easy matter to articulate. So I give the authors credit for this attempt.
《Nature Reviews Electrical Engineering》是《Nature》旗下聚焦电子电气工程与智能系统的重要综述期刊。该成果是人机物融合群智计算团队深化科学前沿探索、推动多学科交叉融合的重要进展,成果的发表体现了团队在该领域的系统性研究能力与国际影响力。

人机物融合群智计算教育部重点实验室参加学术会议合影
(审稿:郭斌)